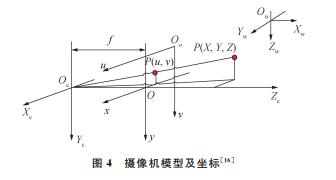
��Ŀҕ�X��λϵ�y��Ҫͨ�^����ϵ֮�g�ľ��׃�Q���F����Ķ�λ,ͨ���õ���������ϵ,��D ����ʾ[����]:��������ϵ���z��C����ϵ������ƽ�� ����ϵ����������ϵ.������ȡ�õ��ıO��ҕ�l, ����Ӌ����������������ϵ����,ͨ�^�������� �c����ƽ�������D�Q,����ƽ���c�z��C�����D �Q,���ɵõ������ڔz��C����ϵ�еľ��wλ��. ����Mһ���_�����������S��������ϵ�е�λ��, �����^�m���þ��׃�Q,���F�z��C�����c������ �˵��D�Q.
�ڻ�ĬF��,����{���ˆT�Y�ϬF������cҕ �l�O����Ϣ,�����^��ʴ_����ȡ���O�ؔz��C���gλ����Ϣ,�M�������z��C����ϵ.��������ϵ ֮�g�ľ���׃�Q,��Ôz��C����ϵ�ͳ��������� ��ϵ���Pϵ,�Mһ���õ����������ڔz��C�Ŀ��gλ���Pϵ,�Ķ����F���涨λ.
���w����׃�Q�IJ��E����:
��������ϵ��,�c�Ĕz��C����ϵͶӰ�����S ����ƽ������ϵ���������Pϵ,

ʽ��:(x,y)��ʾ���g�c�ڈD������ϵ�µ����� ֵ,f ��ʾ�z��C����,(Xc,Yc,Zc)����g�c�� �z��C����ϵ�µ�����.
�ڳ���ƽ����,�D���D�Q�����؈D���������D ���Pϵ,

ʽ��:���g�c�������������˞�(u,v),ÿ������ ��x�S��y �S�����ϵ������ߴ���dx ��dy ��ʾ, ����ƽ �� �� �� ϵ �� ԭ �c �� �� �� �� �� �� �˞� (u��, v��).�C�������Pϵ,���Եõ�
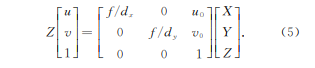
ʽ(��)��(X,Y,Z)��z��C����ϵ�еĻ���λ������.


